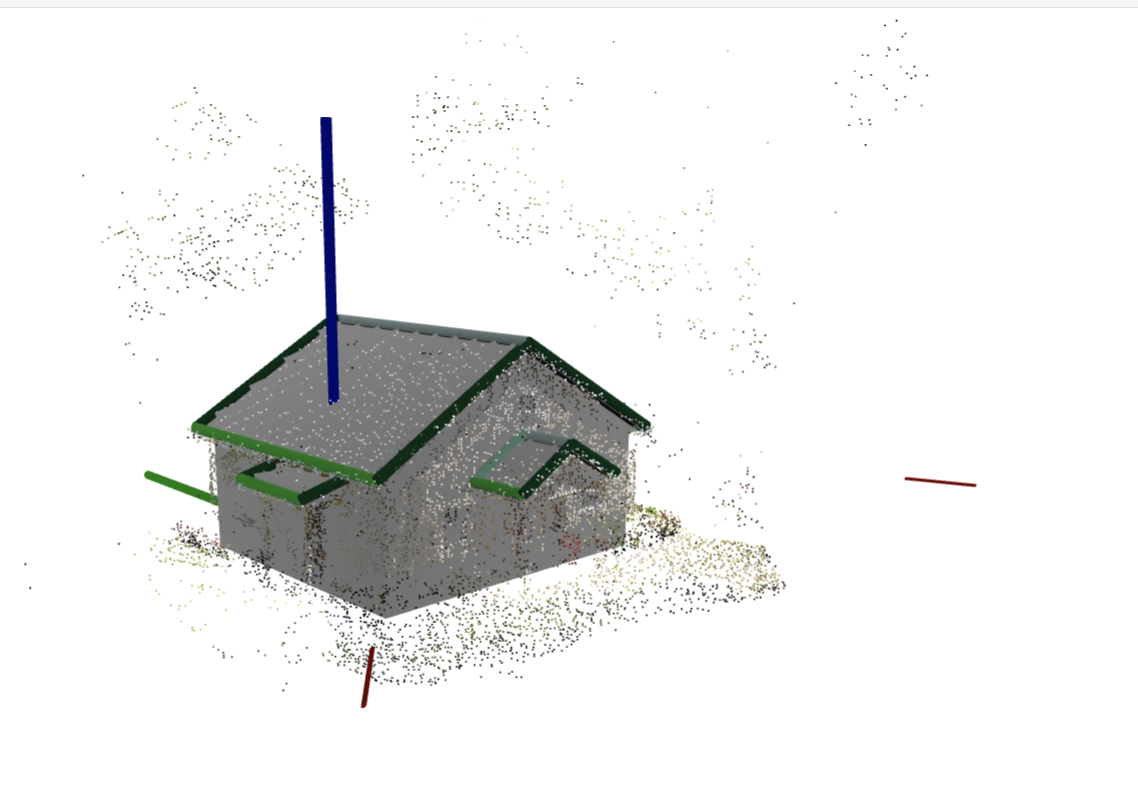
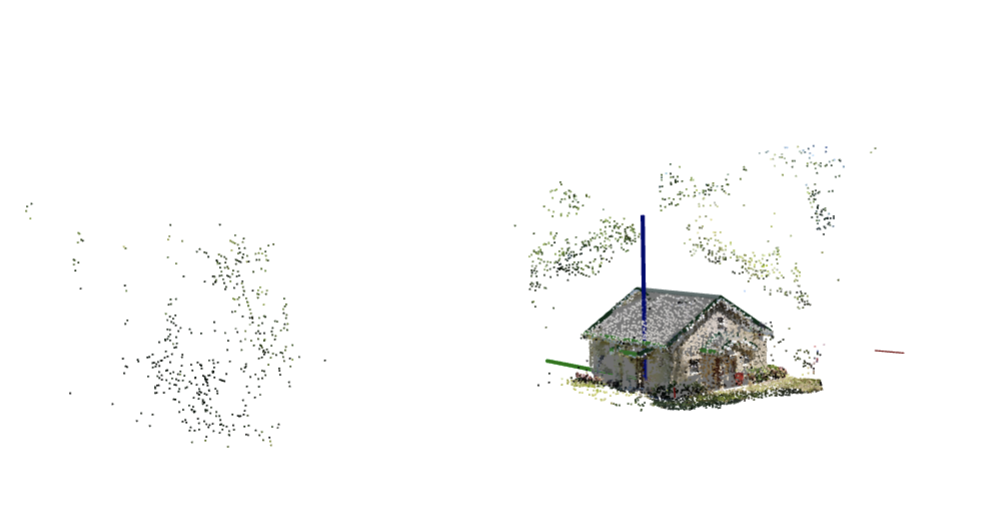
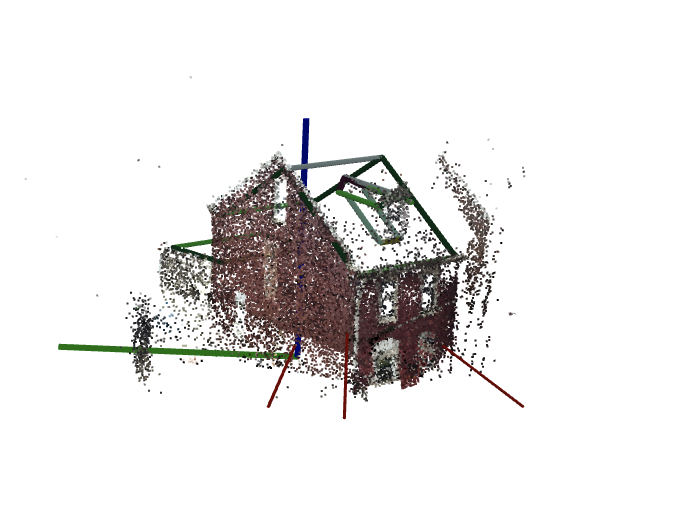

 The roofs below are interactive as well!
### Additional notes on data
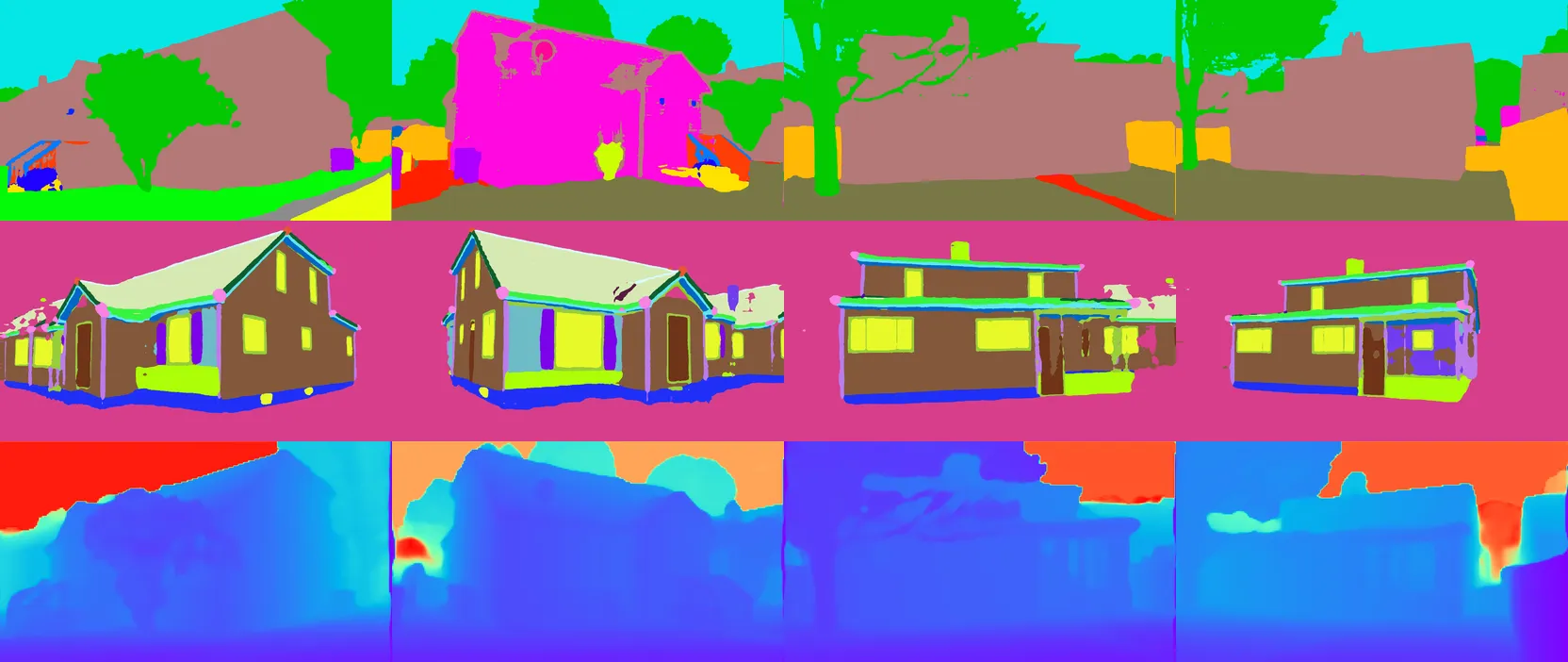
#### Depth
The `depthcm` is a result of running monocular depth model, and it is not ground truth by no means. If you need to have a GT depth, you can render the GT mesh in the training set using `mesh_faces` and `mesh_vertices`.
The semi-sparse depth from the Colmap reconstructions with dense features, available in `points3d` is much more accurate, than `depthcm`.
At the inference time, `mesh_faces` is not available, so you can use only `depthcm` and colmap point cloud from `points3d`
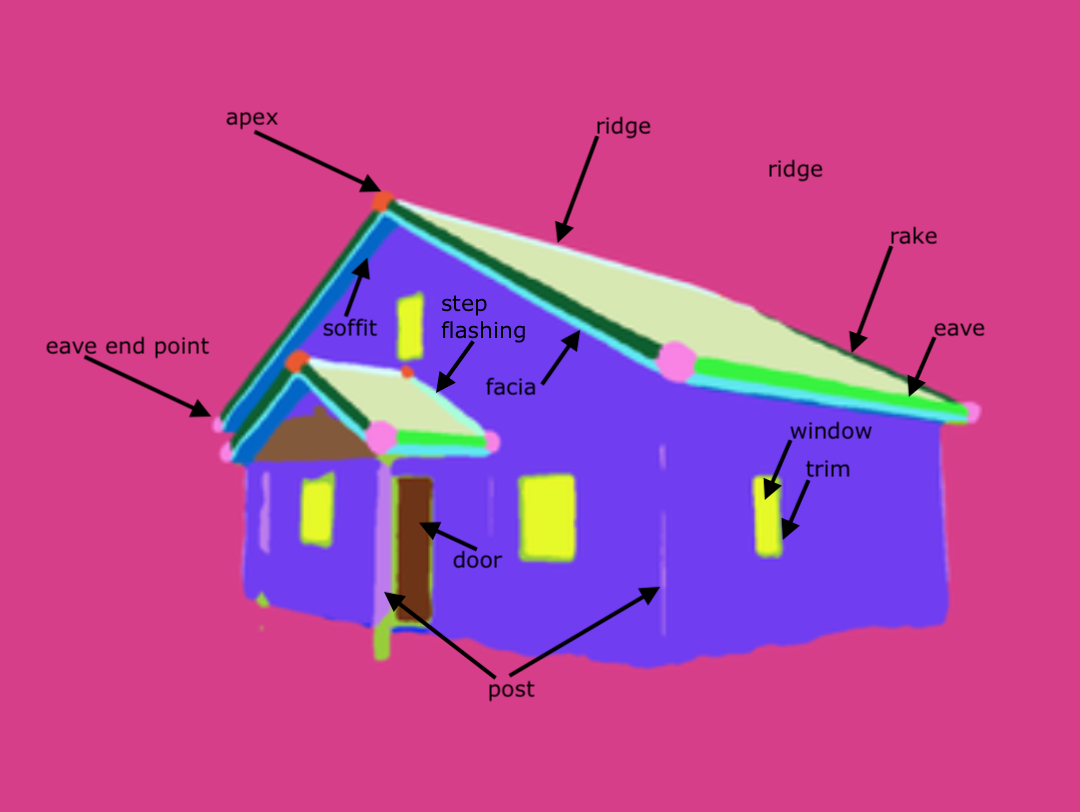
#### Segmentation
You have two segmentations available. `gestalt` is domain specific model, which "sees-through-occlusions" and provides a detailed information about house parts. See the list of classes in "Dataset" section in the navigation bar.
`ade20k` is a standard ADE20K segmentation model (specifically, [shi-labs/oneformer_ade20k_swin_large](https://huggingface.co/shi-labs/oneformer_ade20k_swin_large)).
## Organizers
Jack Langerman (Hover), Dmytro Mishkin (CTU in Prague / Hover), Ilke Demir (Intel), Hanzhi Chen (TUM), Daoyi Gao (TUM), Caner Korkmaz (ICL), Tolga Birdal (ICL)
## Sponsors
The organizers would like to thank Hover Inc. for their sponsorship of this challenge and dataset.
## Timeline
- Competition Released: March 14, 2024
- Entry Deadline: May 28, 2024
- Team Merging: May 28, 2024
- Final Solution Submission: June 4, 2024
- Writeup Deadline: June 11, 2024
## Prizes
- 1st Place: **$10,000**
- 2nd Place: **$7,000**
- 3rd Place: **$5,000**
- Additional Prizes: **$3,000**
Please see the [Competition Rules](https://usm3d.github.io/S23DR/s23dr_rules.html) for additional information.
### Cite
```
@misc{Langerman_Korkmaz_Chen_Gao_Demir_Mishkin_Birdal2024,
title={S23DR Competition at 1st Workshop on Urban Scene Modeling @ CVPR 2024},
url={usm3d.github.io},
howpublished = {\url{https://huggingface.co/usm3d}},
year={2024},
author={Langerman, Jack and Korkmaz, Caner and Chen, Hanzhi and Gao, Daoyi and Demir, Ilke and Mishkin, Dmytro and Birdal, Tolga}
}
```
The roofs below are interactive as well!
### Additional notes on data
#### Depth
The `depthcm` is a result of running monocular depth model, and it is not ground truth by no means. If you need to have a GT depth, you can render the GT mesh in the training set using `mesh_faces` and `mesh_vertices`.
The semi-sparse depth from the Colmap reconstructions with dense features, available in `points3d` is much more accurate, than `depthcm`.
At the inference time, `mesh_faces` is not available, so you can use only `depthcm` and colmap point cloud from `points3d`
#### Segmentation
You have two segmentations available. `gestalt` is domain specific model, which "sees-through-occlusions" and provides a detailed information about house parts. See the list of classes in "Dataset" section in the navigation bar.
`ade20k` is a standard ADE20K segmentation model (specifically, [shi-labs/oneformer_ade20k_swin_large](https://huggingface.co/shi-labs/oneformer_ade20k_swin_large)).
## Organizers
Jack Langerman (Hover), Dmytro Mishkin (CTU in Prague / Hover), Ilke Demir (Intel), Hanzhi Chen (TUM), Daoyi Gao (TUM), Caner Korkmaz (ICL), Tolga Birdal (ICL)
## Sponsors
The organizers would like to thank Hover Inc. for their sponsorship of this challenge and dataset.
## Timeline
- Competition Released: March 14, 2024
- Entry Deadline: May 28, 2024
- Team Merging: May 28, 2024
- Final Solution Submission: June 4, 2024
- Writeup Deadline: June 11, 2024
## Prizes
- 1st Place: **$10,000**
- 2nd Place: **$7,000**
- 3rd Place: **$5,000**
- Additional Prizes: **$3,000**
Please see the [Competition Rules](https://usm3d.github.io/S23DR/s23dr_rules.html) for additional information.
### Cite
```
@misc{Langerman_Korkmaz_Chen_Gao_Demir_Mishkin_Birdal2024,
title={S23DR Competition at 1st Workshop on Urban Scene Modeling @ CVPR 2024},
url={usm3d.github.io},
howpublished = {\url{https://huggingface.co/usm3d}},
year={2024},
author={Langerman, Jack and Korkmaz, Caner and Chen, Hanzhi and Gao, Daoyi and Demir, Ilke and Mishkin, Dmytro and Birdal, Tolga}
}
```